摘要:以近些年我国城市轨道交通隧道病害检测技术为对象,总结目前针对不同隧道病害所采用的常用检测技术以及新型检测技术,其中新型检测技术包括传感器检测技术、数字照相检测技术、激光扫描检测技术以及多功能集成的隧道检测车技术。详细介绍这几种新技术的原理,对比这几种检测技术的适用范围(检测病害类型)以及在环境条件、检测频率、处理速度、费用、人工依赖程度等各个方面的优势与劣势,表明自动化、实时化和集成化将是未来隧道检测技术发展的重要方向,传统人工+设备的检测模式将逐步转化为设备自动检测,技术人员的主观判别将逐渐被自动化检测代替;而集成化的检测设备也必将成为未来隧道检测设备的发展趋势。
1隧道结构病害及其检测的困难
城市轨道交通隧道结构受施工期质量缺陷、材料性能劣化、列车振动、周边工程活动等多种内外因素的影响,在运营期会出现结构病害,主要表现为:渗漏水、衬砌裂缝、衬砌掉块、接缝张开、管片错台、纵向沉降、横向收敛变形等[1-3]。这些病害如果不予以控制,会影响隧道正常使用,甚至会影响结构安全,因此及时检测并发现结构病害十分重要。
目前隧道结构病害检测存在的困难主要有:随着轨道交通数量的增加,日常检测工作量随之增加,但是可供结构病害检测的窗口时间非常有限;以数字照相和激光扫描为代表的隧道结构检测技术发展迅速,但是针对检测获取的海量数据缺乏病害快速提取方法;缺少能够同时检测多种病害的高效手段,尚未形成高效的隧道结构病害综合检测体系。
2隧道结构病害检测技术
2.1 不同隧道病害的检测策略
从长期监测数据和人工巡检结果可以看出,城轨隧道病害检测大体可分为两类,第一类为针对具体病害,如渗漏水、衬砌裂缝、衬砌掉块、接缝张开、管片错台等,这些病害的特点有具体的表现形式,可以从隧道表面观察或者通过仪器测量(如管片错台),可以观察到错台量,而错台本身会对轨道造成影响;第二类为检测引发病害的原因(如纵向沉降、横向位移、收敛变形、限界侵入等),这些病害本身并没有表现形式,但是这些病害如果发生,会引发第一类病害(如收敛变形会造成渗漏水、接缝张开、衬砌掉块等),这类检测工作一般需要制定检测指标才能进行(如收敛变形的收敛直径、限界尺寸等)。第一类检测的病害是微观的,可以定位到某一环的某一个管片或接缝,第二类检测是宏观的,往往是每5环得到一个测量值便可以估计隧道的健康状况。因此针对不同的检测内容,检测策略也并不相同,第一类检测有具体表现形式,便于观察,一般采用人工巡检就可以得到结果,第二类检测则需要人工配合测量仪器进行检测。
2.2 检测技术
2.2.1 目前常用检测手段
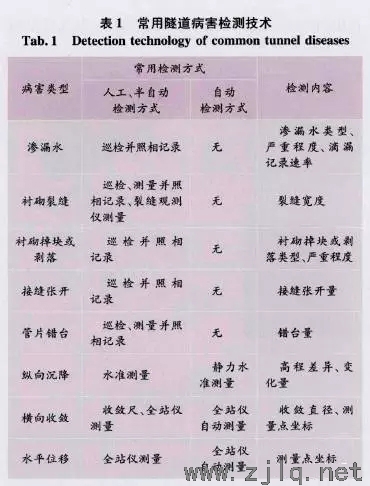
目前城轨隧道针对不同病害,常用的隧道病害检测技术如表1所示,可以看出传统的隧道病害检测方法主要以人工为主,即依靠人眼检测以及人工仪器检测[4-10],这两种方法的优点是技术成熟可靠,但同时存在对检测人员要求较高,检测人员的安全作业难以保证的缺点,存在安全不确定性,同时人工检测具有较大的主观性,即使经验丰富的检测人员也难以保证检测结果的完整性与准确性。随着当前检测工作量的不断增大,这种人工加仪器的方式越来越难以满足检测的需求,完成全部检测所需时间也越来越长,检测人员的安全性也无法得到保证。
2.2.2隧道检测新技术
针对目前常用的隧道检测技术的弊端,国内外引入或研制了一些检测新技术用于隧道检测中。隧道检测新技术可以分为4类:传感器检测技术、数字照相检测技术、激光扫描检测技术、手持式病害记录技术。除以上4种之外,目前将上述技术综合起来的隧道综合检测技术也发展迅速。
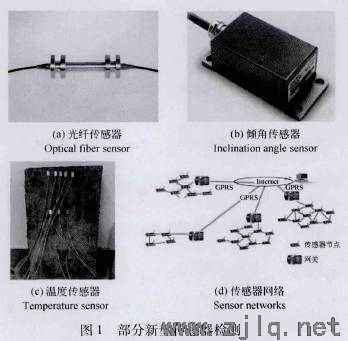
1)在传感器检测技术方面,目前在隧道中的主要应用有4种:① 利用分布式光纤传感器检测隧道纵向变形[11](见图l(a)),光纤传感器属于目前国际上最前沿的尖端技术,它与传统监测技术相比具有分布式、长距离、精度高和耐久性长等特点[12],可对沿光纤的轴向应变进行分布式监测;② 利用无线倾角传感器检测地下隧道的结构变形(见图1(b)),利用微机电系统(MEMS)技术和无线传感器网络技术实现传感器自动检测[12];③ 程姝菲、黄宏伟[13]提出了基于温度传感器的渗漏水检测法(见图1(C)),以及基于电导率法的渗漏水检测;④ 无线通信技术应用于隧道检测中,配合传感器技术可以发挥更大的作用(见图1(d)),采用无线通信技术可灵活安装在结构任意位置,监测节点可方便地增加或减少,并且可以减少供电设备和线路的使用,节约隧道空间,嗡测网络节点愈多,其无线组网优势愈加明显。[14]
传感器技术的应用可以实现实时检测的效果,对于病害严重或需要重点监测的位置可以起到精密监测的作用,但是传感器检测也具有一定的缺点,例如供电问题,若使用隧道内电路则需要布设大量供电线,如果使用自带电源又需要时常更换电池。同时,传感器检测的传感器价格也比较昂贵,在隧道中如果布设位置不佳,还会对列车运行造成影响。
2)数字照相技术主要是利用数字相机或摄像机采集隧道表面图像,利用图像处理技术可以检测隧道渗漏水和裂缝。[15]在数字照相检测技术方面,2007年 Masato Ukail[16]研制出针对隧道表面的监测设备。瑞士Terra研制出针对裂缝检测设备tCrack,可以用于城轨隧道的裂缝检测,速度为2.5 km/h 我国在数字照相隧道检测方面,同济大学黄永杰、柳献等[17]提出的盾构隧道渗漏水自动检测技术,可用于盾构隧道的定期检测。与传统的人工检测方法相比,方便、省时和省力,具有较强的实用价值。盾构隧道渗漏水自动检测系统能够准确采集、识别和分析盾构隧道的管片渗漏,且其精度较高。经过现场试验,验证了该检测系统的可操作性和试用性。数字照相技术的优点是,相对于传统方式,可以采集图片信息,信息量更丰富,利用图像识别技术更是可以获取精确的病害信息,如渗漏水边缘信息甚至足裂缝宽度,但是数字照相对光源的要求较高,闪光灯频繁闪烁会对操作人员的视觉造成影响,另外数字照相获取的隧道内表面只能是局部信息,若想获取完整的隧道内表面展开图,还需大量 像拼接工作.需要专业人员及使用专用像处理软件处理。
3)激光扫描技术主要是利用激光扫描仪得到隧道内表面点云数据,利用云点数据,判断隧道结构变形状态,如结构收敛变形等,日前利用地面三维激光扫描技术对地铁隧道进行收敛变形监测,从地铁隧道数据采集、 三维模型建立 、数据处理、成果输出等几个方面来看, 三维激光扫描技术是一种高效的地铁隧道收敛变形监测手段;也可以利用扫描点反射率数据得到隧道内表面图像,从而获取隧道渗漏水、衬砌掉块与剥落、裂缝等病害信息。我国在三维激光扫描检测方面,夏国芳。王晏民[18]提出利用三维激光扫描仪获取隧道横纵断面冈,这种方法能够在高程变化剧烈处反映隧道高程的真实变化;毕 俊、冯琰等[19]研究了一种在地铁隧道中应用定站式三维激光扫描仪快速检测隧道变形的疗法;谢雄耀、卢晓智等[20]提出了基于三 维激光扫描技术的隧道全断而变形测量方法,一方面给出了测站间距和扫描分辨牢的最佳取值,另一方面提出了基于点云的隧道三维建模算法,使隧道变形可视化。目前三维激光扫描仪检测多数用于隧道收敛变形检测、渗漏水监测,高精度的三维激光扫描仪也可用于检测裂缝。三维激光扫描仪的优点是采集信息量完整精确,采集隧道内表面点云信息丰富,并且不需要光源就可以得到隧道内表面图像,但基于三维激光扫描仪的检测方式也有缺点,例如定站式的测量方式需要不停地移动激光扫描仪,步骤相对复杂,采集信息的后期处理任务量大,相比于数字照相技术,其精度较低,不适用于细小裂缝的采集。
4)手持式病害记录技术是人工巡检的辅助技术,例如由上海同岩土木公司研发的手持式地铁隧道结构病害调查数据记录仪[21]。在人工巡检时,巡检人员可以利用记录仪记录巡榆的病害信息,记录仪保存有隧道内表面展开图,检测人员可以将发现的病害记录在内表面展开图上,并日可以利用记录仪上的图像采集工具获得病害图像,记录仪采用专用符号记录病害数据,这样便于后期的数据处理和参考。病害记录仪的优点是方便巡检人员记录检查到的病害数据,也可以采集病害的图像数据,不用再携带照相设备,但是病害记录仪仅仅仅可以帮助巡检人员记录数据,病害还是要靠巡检人员目视检查,对巡检人员的要求很高,并且不同的巡检人员,最终得到的巡捡记录也并不相同。
5)除单项病害检测设备外,目前隧道综合检测设备也逐渐发展完善,综合监测设备可以集多种病害检测功能于一身,叮以达到高效率检测的目的,从而节约人力成本。目前隧道检测没备在公路隧道中已经获得了巨大进步,如2013西班牙Euroconsult开发出隧道检测设备 Tunnelings [22],其速度可达40 km/h。瑞士Terra研制出裂缝检测设备tCrack,可以用于城轨隧道的裂缝检测,速度为2.5km/h。 我国在摄影测量隧道检测方面,西南交通人学王睿等[23]研制的数字照相检测设备可以识别0.2 mm裂缝,检测速度为13 km/h。北京交通大学李鹏等[23]研制的数字照相检测设备采用11台CCD相机,时速为70 km/h,该设备整体较大,适用于公路隧道。 但是, 在地铁隧道中尚没有像公路隧道检测车那样高效的检测没备,一般是依靠人力推动(如隧道检测车系统),瑞士AMBERG公州生产的GRP5000测量系统[25]日前在国内北京、上海均有应用,如图2(a)所示,该仪器为可移动二维激光扫描仪,可形成基于反射率的隧道全断面扫描图像,其精度不满足裂缝识别,但可以识别渗透水、掉块等病害,并且可以进行限界检测,采集隧道内表面点云 ,最新型的GRP5000设备可以配合全站仪得到隧道真实内表面点云坐标,实现隧道真实点云建模,其结果与定站式三维激光扫描仪得到的结果类似,利用这种设备数据激光扫描仪,可以不用考虑搬站的问题,直接在轨道上推进,目前检测速度很慢,难以达到代替人工的目的。此外,上海通芮斯克公司研发的MTI-100隧道检测车也是一种集合多种传感没备的综合检测车,该设备为利用数字照相技术,如同2(b)所示,由6台CCD相机组成,时速为3~5km/h,适用于城轨隧道,该设备人工推进,可以采集隧道内表面图像信息,识别裂缝、渗透水、掉块于剥落等病害,并且记录病害位置。但该设备不能扫描隧道内表面点云数据,因此对于隧道变形类的病害不能检测。同济大学袁勇[26]等研制了一种基于数字照相技术的隧道检测车,其原理与MTI类似,利用多个摄像机采集不同方向的隧道内表面图像,即检测车每推进相同距离,摄机机组采集1次图片信息,这种检测车可以检查渗漏水、裂缝、掉块或剥落等病害,但是同样不能采集点云数据。
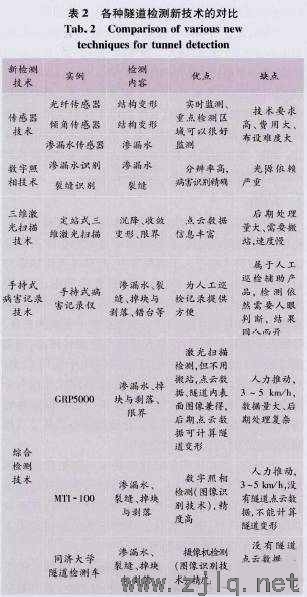
通过介绍的几种综合检测设备可以看出 ,综合检测设备或是基于激光扫描,或是基于数字照相,基于激光扫描的检测车由于激光扫描仪本身的限制,往往不能检测裂缝,而基于数字照相的检测车设备,由于不具备扫描仪,不能获取点云数据,因此无法检测隧道变形。基于上述几种隧道检测新技术,笔者列出各种技术的优缺点如表2所示。

从设备购买和维护成本来看,传感器单价较其他仪器较低,但是其具有不可移动性,只可用于固定位置监测,并且要考虑电力供应、信号传输等成本;数字照相技术成本较低,只需要数字相机和稳定光源即可,但是后期处理需要专业的图像处理软件才能获得检测结果;手持式病害记录仪相对成本较低,是以人工检查为主的辅助性工具;综合检测车国外价格昂贵,国内处于研究试验居多,目前还没有完全商业化生产。
从数据存储和处理时间成本来看,新型检测技术所需的数据存储空间非常大,例如传感器的实时监测会带来大量监测数据,数字照相获取的照片均为高清图像,而激光扫描仪获得的点云数据也是海量数据(每秒50万以上的采集点),所以新型隧道检测技术所需的存储空间和数据处理时问都是远大于传统人工检测的。
当然,大量的数据可以带来高质量的分析结果,例如传感器数据可以超越人工测量的时间限制,实现实时监控;数字照相技术获得的图像识别结果可以提供人工检测不能提供的数据类型(如渗漏水面积等);激光扫描仪可以提供整个隧道的点云数据用于分析变形。这不仅带来了检测结果的精确化,更带来了检测内容的多样化。同时,新型检测技术逐渐减弱人工主观经验在检测记录过程中的作用,增加了检测的客观性。
3结语
近年来隧道结构病害检测技术发展可以看出3个趋势:1)检测自动化,虽然目前病害检测仍以人工巡检、全站仪和水准仪人工测量为主,但是各类传感器和自动检测设备越来越多地应用于病害检测中,病害检测方式由传统的人工检测趋向于半自动检测和全自动检测;2)检测实时化,由于传感器设备的发展和普及,特别是全自动监测设备(如预埋应力应变传感器、倾角传感器等),检测频率由定时检测趋向于实时监测;3)检测集成化,检测工具由单一病害检测仪器趋向于
综合病害检测系统,可实现一种设备一次检测多种病害,(如搭配数字相机的隧道综合检测设备或基于三维激光扫描的隧道新型检测设备)。
自动化、实时化和集成化将是未来隧道检测技术发展的重要方向。传统人工+设备的检测模式将逐步转化为设备自动检测,技术人员的主观判别将逐渐被自动化检测代替;而集成化的检测设备也必将成为未来隧道检测设备的发展趋势。
同时,应认识到目前这些新型隧道检测技术的不足,一是目前的隧道检测车、三维激光扫描仪或是数字照相技术,都是需要大量人力配合完成,人力成本并没有降低;二是采集的大量检测数据需要专门人员分析处理,而目前检测数据的综合分析处理并没有形成很好的体系。
笔者认为,未来的隧道检测技术应重点关注3个方向的发展:硬件设备的发展,如提升传感器性能,以及检测速度和检测精度的提升;相应的软件技术应用,如获取图像的模式识别技术、传感器数据的无线传输技术,海量传感器数据和点云数据的存储与处理技术;检测人员身份的转变,在未来的隧道检测中,检测人员的身份会逐步从数据获取者向数据分析者转换,为此检测单位应逐渐加大人才培养,以适应未来隧道病害检测的发展趋势。
虽然目前各类新型隧道检测技术还处在研究阶段或试验性使用阶段,笔者相信,在不久的将来,应用上述新技术的隧道检测体系会出现在我国城轨隧道日常的维护当中。
参考文献:
[1]叶耀东,朱合华,王如路.软土地铁运营隧道痛害现状及成因分析[J].地下空间与工程学报,2007(1):157-160.
[2]王如路.上海软土地铁隧道变形影响因素及变形特征分析[J].地下工程与隧道,2009,l(1):1-6.
[3]张明海,张乃涓.盾构隧道常见病害及其影响分析[J].城市道桥与防洪,2009(9):182-187.
[4]季倩倩.带裂缝的盾构隧道衬砌力学模型研究[J].地下空间与工程学报,2009,5(S2):1480-1483.
[5]徐凌,黄宏伟,罗富荣.软土地层盾构隧道纵向沉降研究进展[J].城市轨道交通研究,2007(6):53-56.
[6]赖金星,邱军领,潘云鹏,等.盾构隧道管片裂缝病害的综合监测与分析[J].现代隧道技术,2015,52(2):186—191.
[7]李玉宝,沈志敏,苏明,等.地铁盾构隧道收敛和沉降监测数据处理与分析[J].东南大学学报(自然科学版),2013,43(A02):296-301,
[8]詹龙喜,唐继民,张少夏.基于自动化监测技术的地铁沉降数据一致性分析[J].上海国土资源,2013,34(4):84-86.
[9]施斌,徐学军,王镝,等.隧道健康诊断BOTDR分布式光纤应变监测技术研究[J].岩石力学与工程学报,2005,24(15):2622-2628.
[1O]李悦,经纬.精密监测技术在天津地铁运营维护管理中的应用[J].市政技术,2013,31(s2):55-59.
[11]史彦新.分布式光纤应变监测系统研究[Dj.北京:中国地质大学(北京),2010.
[12]何斌,纪云,沈润杰.地下隧道变形检测的无线倾角传感器[J].光学精密工程,2013,21(6):35-38.
[13]程姝菲,黄宏伟.盾构隧道长期渗漏水检测新方法[J].地下空间与工程学报,2014,10(3):733-738.
[14]谢雄耀,冯雷.无线传感器网络技术的研究进展及其在地铁隧道中的应用挑战[J].岩石力学与工程学报,
[15]黄宏伟,孙奠,薛亚东.基于机器视觉的隧道衬砌表面病害检测技术研究进展[J].现代隧道技术,2014(S1):19-31.
[17]黄永杰,柳献,袁勇,等.盾构隧道渗漏水的自动检测技术[J].上海交通大学学报,2012,46(1):73-78.
[18]夏国芳,王晏民.三维激光扫描技术在隧道横纵断面测量中的应用研究[J].北京建筑工程学院学报,2010,26(3):21-24.
[19]毕俊,冯琰,顾星晔等.三维激光扫描技术在地铁隧道收敛变形监测中的应用研究[c]//地理信息与物联网论坛暨江苏省测绘学会2010年学术年会论文集,2010:314-317.
[20]谢雄耀,卢晓智,田海洋等.基于地面三维激光扫描技术的隧道全断面变形测量方法[J].岩石力学与工程学报,2013,32(11 ):2214-2224.
[21]上海同岩土木工程科技有限公司.手持式地铁隧道结构病害调查数据记录仪及记录方法:CN201210297912.0[P].2012-12-19.
[23]王睿.隧道衬砌裂缝车载检测图像分析研究[D].成都:西南交通大学,2012.
[24]李鹏.基于图像处理的隧道检测[D].北京:北京交通大学,2006.
[25]沈至毅,谭周.GRP5000隧道检测车在上海地铁的应用研究[J].山西建筑,2013,39(27):158-159.
[26]同济大学.用于隧道的检测车:中国,CN201110086992.0[P].2011-10-12.





